Abstract
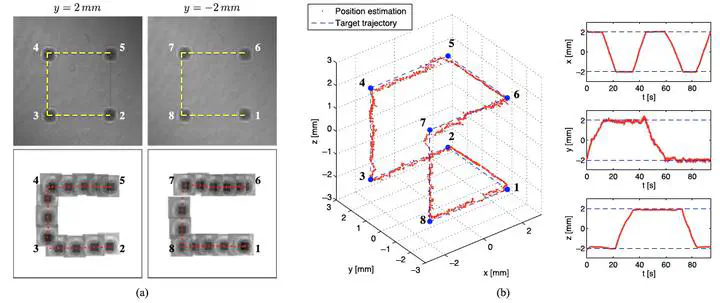
Digital holography is used to track the three-dimensional position of a magnetic microrobot maneuvered in real time by means of an electromagnetic manipulation system. The method presented is able to process holograms at 40 Hz with a position accuracy in the imaging plane and in depth of ± 23 and ± 180 μ m, respectively. As this method does not require magnification, microrobots can be tracked in significantly larger working volumes than conventional optical methods. The performance of this tracking method is demonstrated by visually servoing a magnetic bead around a cubic trajectory.
Type
Publication
IEEE Robotics and Automation Letters, 2 (1)
M. Fatih Toy
Associate Professor of Electrical and Electronics Engineering
My research interests include digital holography, quantitative phase imaging, optical diffraction tomography and optical superresolution.